熱線:021-66110810,66110819
手機:13564362870
熱線:021-66110810,66110819
手機:13564362870
Low-power microelectronics embedded in live jellyfish enhance propulsion
嵌入活水母中的低功耗微電子器件增強了推進力
來源: Xu and Dabiri, Sci. Adv. 2020; 6 : eaaz3194 29 January 2020
摘要核心發現
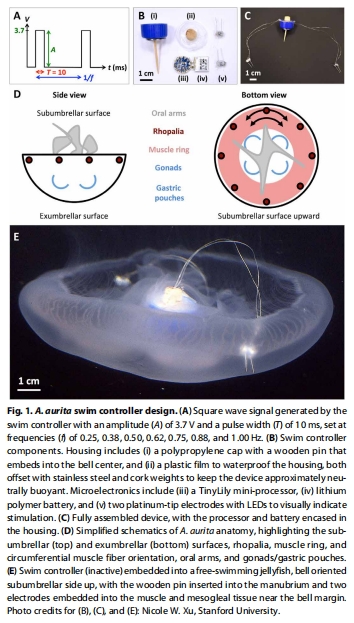
本研究開發了一種生物混合機器人,通過在活體水母(Aurelia aurita)體內植入微型電子控制器(圖1),實現對其游動的外部控制:
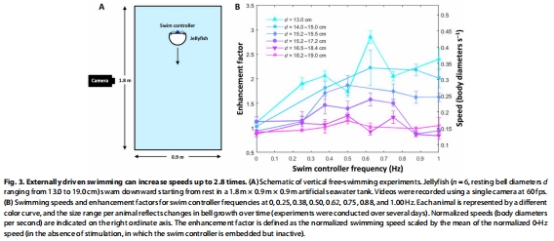
游速提升:外部電刺激使水母游速最高提升2.8倍(圖3B),代謝消耗僅增加2倍,外部功耗僅10mW。
能效突破:系統能效比現有水生機器人高10-1000倍(圖4),為深海監測提供新方案。

生物學意義:首次揭示水母存在隱藏的游動潛力(高頻收縮能力),挑戰了對其生理極限的傳統認知。
研究目的
1.工程目標:
解決軟體機器人驅動效率低、續航短的問題,利用水母天然的高推進效率(低運輸成本COT)。
2.科學目標:
通過外部控制探索水母游動的生理極限,驗證“提高收縮頻率可提升游速”的假說(圖6)。
研究思路
1. 生物-電子融合設計(圖1)
控制器:微型處理器(TinyLily) + 鋰電池(10mAh) + 鉑電極,總重<2g,中性浮力設計。
植入方式:電極插入傘蓋下肌肉組織(圖1E),通過電脈沖(3.7V, 10ms)驅動肌肉收縮。
2. 實驗驗證
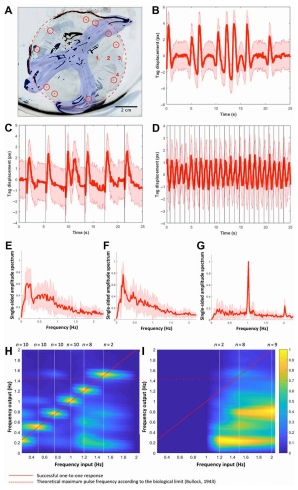
信號驗證:植入標記點追蹤肌肉位移,頻譜分析(SSAS)確認電刺激可精準控制收縮頻率(圖2G)。
游速測試:在1.8m水槽中垂直游動實驗,測量不同刺激頻率(0-1Hz)下的游速(圖3B)。
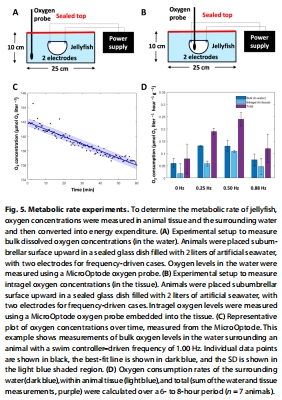
代謝監測:使用丹麥Unisense微氧電極測量組織內/外氧濃度,計算能量消耗(圖5)。
3. 性能對比
對比仿生機器人(如Robojelly)、AUV的能效(圖4),量化生物混合系統的優勢。
關鍵數據及研究意義
1. 游動性能提升(圖3B)
數據:0.5Hz刺激下,游速達3.8 cm/s(自然狀態1.4 cm/s),提升2.8倍。
意義:證明水母存在超生理頻率的游動潛力,為高性能水下機器人設計提供新思路。
2. 能效優勢(圖4)
數據:系統功耗僅0.12 W/kg(0.88Hz時),比機械水母(如Robojelly的1.5 W/kg)低10倍,比AUV(125 W/kg)低1000倍。
意義:突破軟體機器人能效瓶頸,實現長期無纜作業。
3. 代謝成本(圖5D, 圖6)
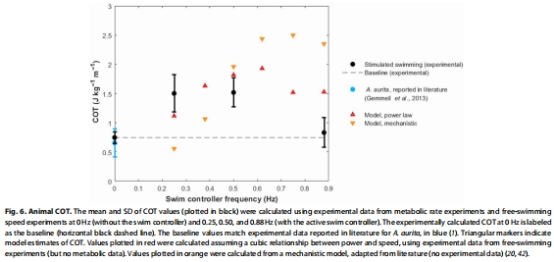
數據:游速提升2.8倍時,代謝耗氧量僅增加2倍(COT從0.6 J/m升至1.2 J/m)。
意義:揭示水母肌肉的高能量利用率,反駁“高頻運動必然高耗能”的假設。
4. 頻率響應極限(圖2H)
數據:肌肉收縮最高響應頻率為1.5Hz(超文獻記錄的1.4Hz生理極限)。
意義:修正水母生物力學模型,為仿生驅動設計提供準確參數。
丹麥Unisense電極數據的獨特價值
技術突破
雙通道測量:同時監測水體溶解氧(圖5A)和組織內氧濃度(圖5B),首次實現活體水母代謝的原位量化。
高時空分辨率:微探針(430μm)精準定位組織氧梯度,避免傳統耗氧儀的群體平均誤差。
關鍵科學發現
1.代謝與游頻的解耦現象(圖5D):
組織氧耗在0.5Hz達峰值,但水體氧耗穩定,表明高頻游動主要依賴局部肌肉代謝,而非全身性耗氧增長。
解釋游速提升2.8倍僅需2倍代謝增加的原因。
2.能量分配策略(圖6):
實驗COT(黑點)低于立方功率模型預測(紅線),揭示水母高效的能量捕獲機制(如渦流被動能量回收)。
3.生理健康評估:
0.88Hz刺激下組織氧濃度未顯著下降(圖5C),證明外部控制未引起缺氧應激,保障動物福利。
應用意義
機器人優化:Unisense數據指導微電子功耗(<10mW)與動物代謝的平衡,實現超低功耗運行。
生態研究:提供活體生物代謝實時監測新工具,助力深海生物能效研究。
結論
1.工程突破:生物混合水母機器人實現三倍游速提升、千倍能效優勢,為可持續海洋監測樹立新標桿。
2.科學啟示:水母肌肉具備超生理頻率收縮潛力,且代謝成本可控,顛覆對其游動機理的認知。
3.技術普適性:Unisense電極的應用證明微電子-生物接口在量化生理參數中的不可替代性。
未來方向:開發非對稱電極實現轉向控制,集成傳感器拓展生態監測功能。